Конструкция и принцип работы ПЛК
Все программируемые контроллеры, имеют схожее устройство и однотипный принцип действия. Конечно, разные производители стремятся привнести что-то свое. Но общие подходы неизменны.
Принцип работы ПЛК
Условно, программируемый логический контроллер можно разделить на несколько отдельных функциональных блоков. К ним относятся:
- Входные терминалы
- Выходные терминалы
- Процессор ПЛК
- Управляющая программа
- Стандартные интерфейсы связи
Входные элементы системы управления, такие как кнопки, ключи, контакты реле, датчики подсоединяются к входным терминалам контроллера. Физические сигналы в них преобразуются в логические или цифровые данные, которые затем обрабатываются микропроцессором. Алгоритм обработки задается в виде управляющей программы. Полученные результаты записываются в выходные устройства, которые выполняют обратное преобразование логических и цифровых сигналов в физические. Физические сигналы включают и выключают подключенные к выходным терминалам сигнальные лампы, реле, контакторы и другие устройства.
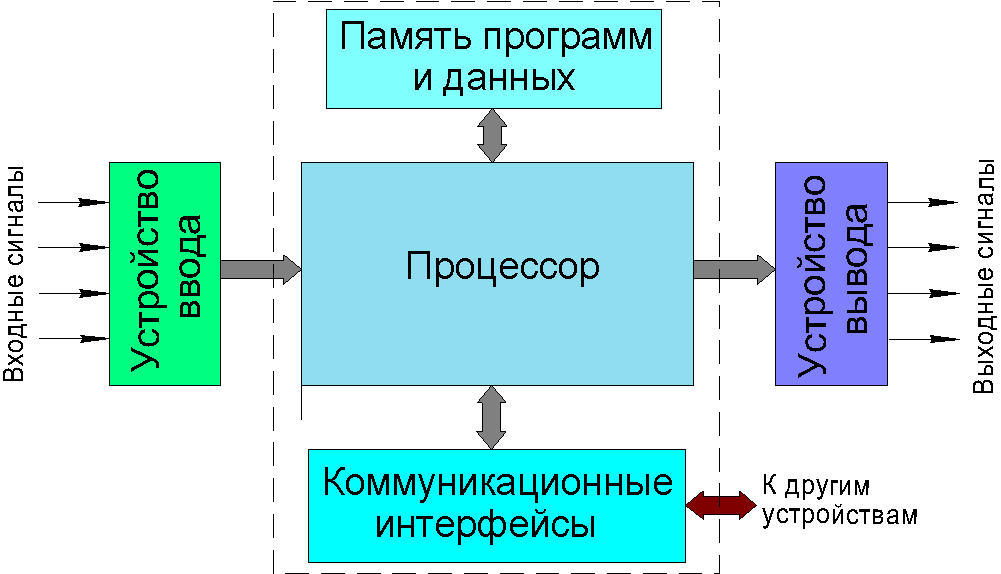
Важную роль в современных контроллерах стали играть интерфейсы связи. С их помощью реализуется обмен информацией как с усстройствми полевого уровня – датчиками и исполнительными механизмами, так и с другими ПЛК. Наличие стандартныйх интерфейсов позволяет строить сложные распределенные системы управления, реализовывать человеко-машинный интерфейс, создавать промышленные инофрмационные сети.
Конструкция ПЛК
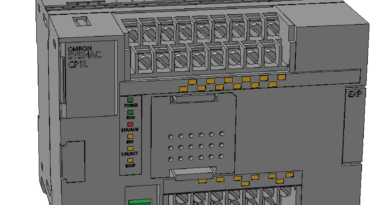
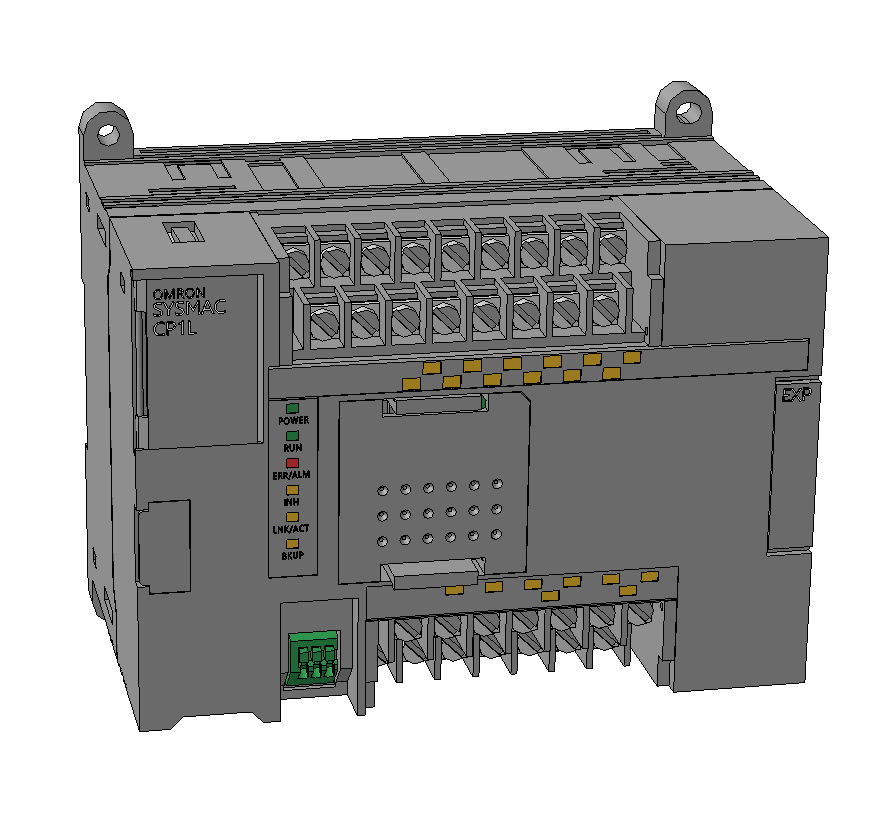
Несмотря на однотипную структуру, конкретная реализация ПЛК может существенно отличаться. Небольшие контроллеры, как правило, реализуются в моноблочном исполнении. Такой конструктив объединяет в одном корпусе процессор, входные и выходные устройства, интерфейсы и модуль питания. Для увеличения возможностей некоторые моноблочные контроллеры допускают подключение небольшого числа модулей расширения.
Моноблочные системы используются для управления небольшими технологическими установками. Как правило это отдельные станки или малые производственные линии. Они требуют несколько больше возможностей, чем способны обеспечить программируемые реле, но отличаются малым числом входных и выходных устройств.
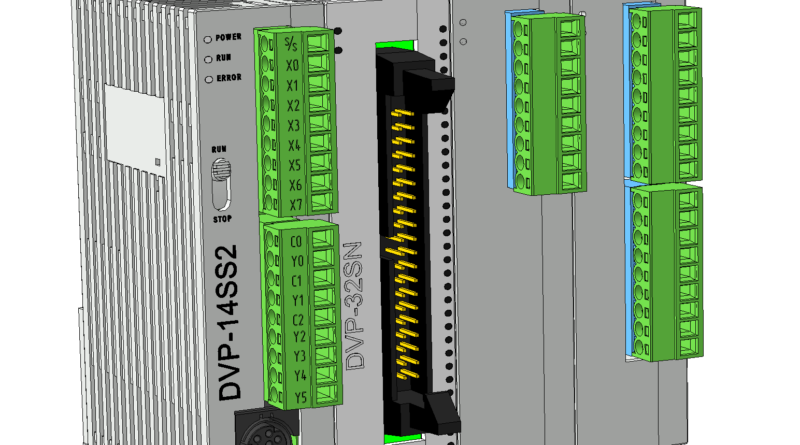
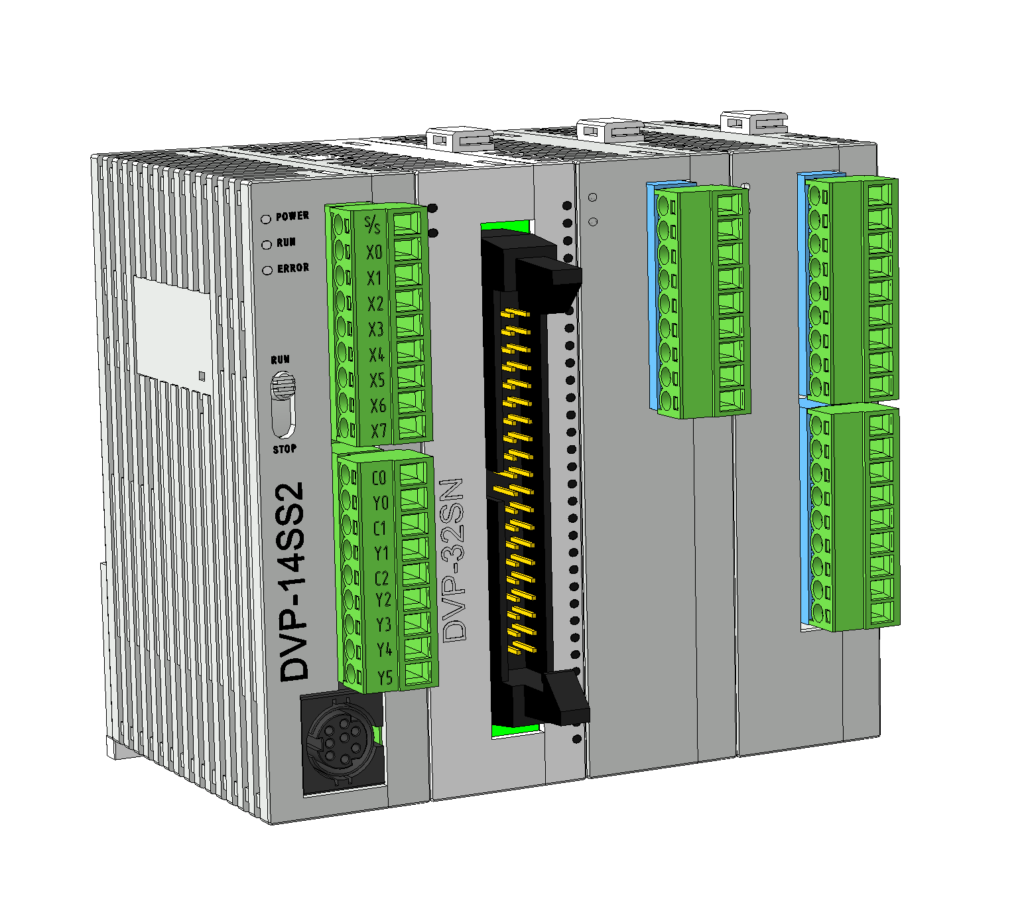
Более мощные контроллеры строятся по модульному принципу. Каждый элемент системы, будь то процессор, интерфейс, входное или выходное устройство выполняются в виде отдельных модулей, которые можно соединять между собой. Пользователь самостоятельно выбирает необходимый состав оборудования, оптимально подходящий для решаемых задач.
В случае очень масштабных объектов автоматизации или их расположении на значительной площади, могут использоваться распределенные системы. Их идеология строится на принципе размещения модулей ввода/вывода рядом с обслуживаемым оборудованием. Связь между модулями и процессором выполняется посредством сетевых интерфейсов. Самые развитые распределенные системы управления получаются при включении в сеть нескольких процессорных модулей, программное обеспечение которых нацелено на совместную работу.